Every distributed fleet today coordinates through something central: a scheduler that assigns the work, a consensus protocol that costs rounds of negotiation, routing tables that must be rebuilt when the topology changes. Each is a single point to lose and a stream of traffic to read — and past the signal horizon, on the far side of the Moon or mid-transit, the center simply is not there.
Flash Coordinate removes the center instead of defending it. Every asset holds the fleet's shared state on the entanglement fabric, and the decisions — who does what, in what order, with what schedule — are computed locally at every asset, identically, not negotiated. There is no scheduler, no handshake, and nothing on the wire an outsider can use.
A concrete mission. Twenty-four assets — rovers and relays — cross the lunar far side for 28 rounds, out of contact with any ground station the entire time. 4,096 survey and relay tasks to divide, power-limited radios, terrain that occludes, radiation on the hops, a relay cluster that dies, and one rogue in the fleet. No scheduler exists. No leader is ever elected. The shared state is 460 bytes.
| Act | What happened | The number |
|---|---|---|
| Allocate | 4,096 tasks awarded across 24 assets by rendezvous on the shared state — 98,304 scores, every asset computing the identical allocation locally | 28 ms · 0 messages |
| The mesh | 3 km radios, multi-hop (mean degree 7 of 23), topology re-wired all 28 rounds; sensing carried by delta gossip; 365 irradiated hops healed by their receivers; 1,757 duplicate arrivals | 80% below full gossip · 0 conflicts |
| The deaths | a relay cluster of three died mid-traverse; every survivor re-allocated locally — exactly the dead assets’ 440 tasks moved, 3,656 never budged | 27 ms · 0 messages |
| The dark | terrain occluded a third of the fleet for six rounds; the dark block rejoined and caught up peer-to-peer; the rogue sprayed 870 junk identities all traverse — the structure refused every one | 20/20 survivors, one worldview · 0 junk propagated |
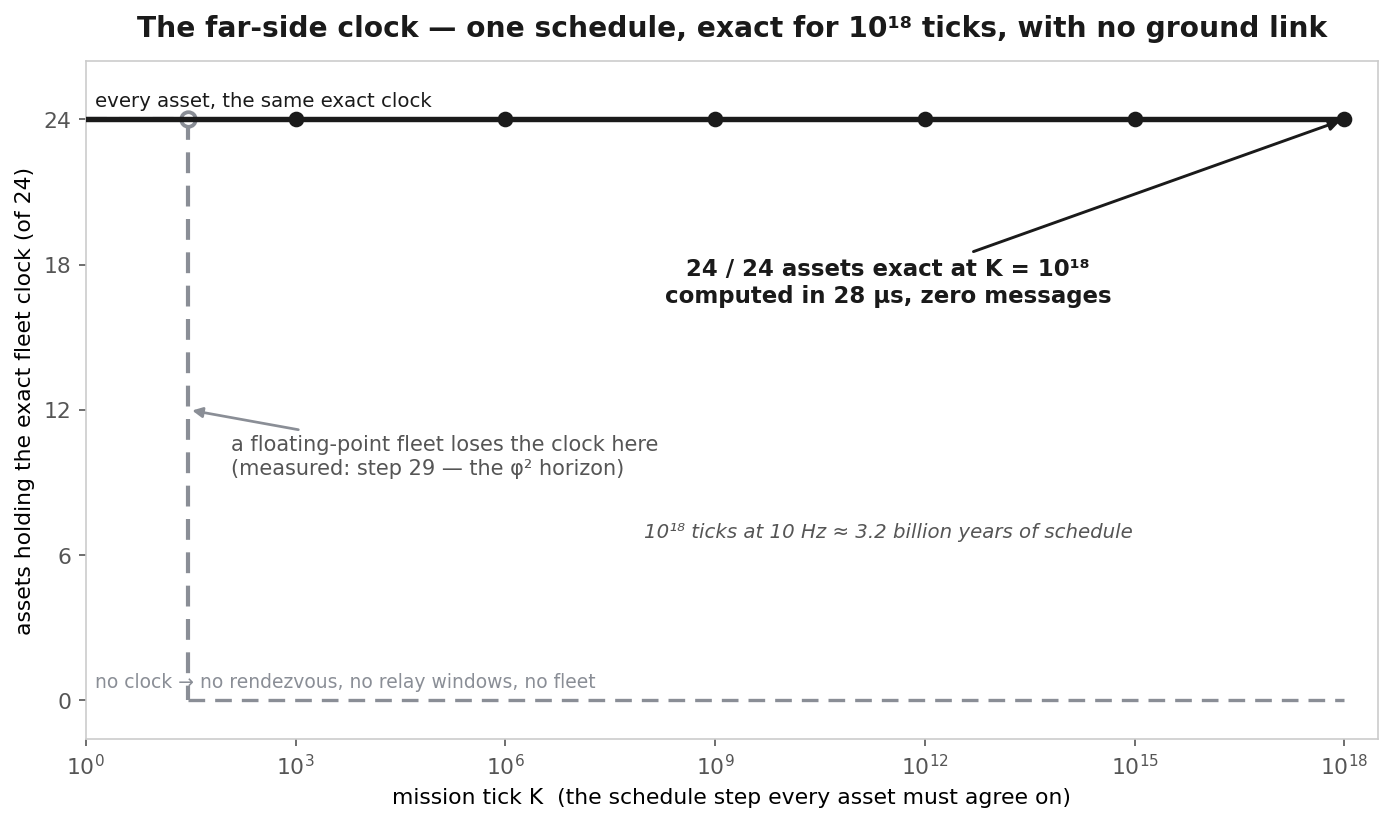
| The clock | the global schedule tick computed exactly at K = 10³ … 1018 at every asset — where a floating-point fleet tracking the same dynamics loses the clock at step 29 (measured) | exact at 1018 · 28 µs |
| The bill | the same decision log — 4,542 decisions — priced at a leader-based consensus protocol’s own arithmetic (replication + acks + elections + heartbeats) | ~209,714 messages · measured here: 0 |
The proof is the hash. The twenty-four assets ran as twenty-four independent processes — no shared memory, no messages, no coordinator — each minting the full decision ledger (the allocation, the re-allocation, every clock tick) from the 460-byte shared state alone. Twenty-four ledgers, one SHA-256 (5c1965dfce6aff4f…). Agreement is not negotiated on the fabric; it is a property of the arithmetic. The consensus bill is not reduced — it is deleted.
Decision ledger (rounded): flash_traverse_solution.json — per-act numbers, the consensus-bill arithmetic, per-asset ledger hash. Illustrative exercise; measured wall times, one workstation.
| Exercise | Conditions | Result |
|---|---|---|
| Task allocation 12 assets · 72 tasks |
no scheduler, no handshake; then 3 assets lost | identical assignment at all 12 assets, 0 messages; 72/72 tasks owned once, ~6 per asset; on loss, only the dead assets’ 24 tasks moved — minimal churn, re-agreed with 0 messages |
| Mobile mesh 40 assets · 10×10 km · 3 km radios |
topology re-wired all 14 rounds; 6 relays failed mid-spread; radiation on 10% of hops | 6-hop mesh (mean degree 7.5 of 39); 84% less radio traffic than full gossip; 874 irradiated hops healed by the receiver; 4,245 second-path arrivals, 0 conflicts; all 34 survivors on one state and one order |
| Peer-to-peer 48 assets · no ground link |
each asset starts at 9% coverage; 12 assets dark rounds 6–11; one rogue spraying junk | fleet coverage 33% → 98% → 100% by round 4; partitioned assets rejoined and caught up peer-to-peer; 496 junk identities rejected structurally, none propagated; 47/47 honest assets on one complete, ordered worldview |
Figures from the module audit records; illustrative exercises, one workstation. Identity rejection shown is of malformed identities; binding a live identity against impersonation is scoped in engagement, not claimed here.
Coordination traffic is a map of your operation: who is tasked, where the fleet thins, when it moves. Flash Coordinate's traffic carries none of it in the clear. Messages are address-gated on the fabric — delivered at fidelity 1 to exactly the keyed receivers and no others — and the per-receiver keys can be minted only by executing the fabric itself: published barriers close the key schedule from both the computational and the physical side. An observer holding the entire channel holds noise; a forged participant fails the structure before it reaches a decision.